Diese Praxisaufgabe ist sehr herausfordernd.
Ein Roboter kann auch so programmiert werden, dass er seinen Weg selbstständig findet. Dazu benötigt er einen Sensor. Der nächste Roboter wurde so programmiert, dass er selbstständig seinen Weg durch das Labyrinth findet.
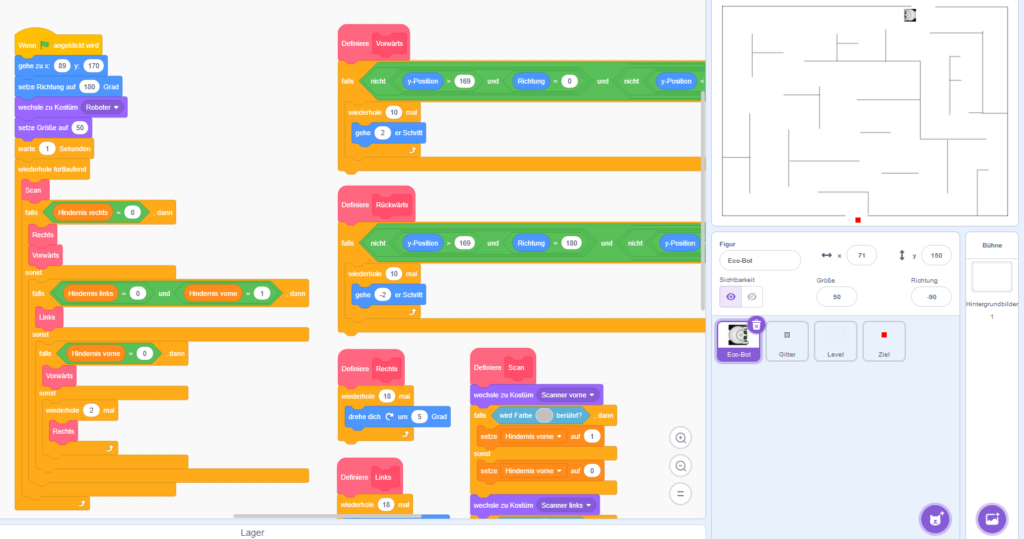
Schau dir den Roboter an. Wie geht er vor? Schau dir auch die Kostüme des Roboters an. Wie funktionieren sie?
Vergleiche die beiden Roboter. Was sind die Vor- und Nachteile, wenn du dem Roboter einen festen Weg vorgibst? Was sind die Vor- und Nachteile eines selbstständigen Roboters?
Achtung: Lade die Seite neu und starte das Programm neu, wenn der Roboter nur im Kreis fährt.
Hinweis: Diese Praxisaufgabe wurde so erstellt, dass sie auch gut im Unterricht mit älteren Schülerinnen und Schülern eingesetzt werden kann. Die Aufgabe ist in der Kompetenz MI.2.3.l und Kompetenz MI.2.2.i des Lehrplan 21 verankert.
Anleitung
Wechsle zur Scratch-Seite Roboter mit Scanner.
- Drücke zuerst auf den Startknopf und beobachte den Roboter. Wie geht er vor?
- Schau ins Programm hinein. Wie funktioniert der Scanner? Wechsle beim Roboter dazu die verschiedenen Kostüme (Klicke den Roboter an ➔ Kostüme ➔ auf jedes Kostüm drücken).
Wie geht der Roboter der Reihe nach vor? Was wird geprüft (Sensoren) und wie wird reagiert (Aktoren)?
Musterlösung
Vorteile des direkten Programmierens: Der Roboter nimmt einen effizienten Weg und schwierige Stellen können situativ berücksichtigt werden.
Nachteile des direkten Programmierens: Der Roboter muss für jede Situation (jedes neue Labyrinth) wieder neu programmiert werden. Er kann nicht selbstständig seinen Weg finden.
Vorteil eines anpassungsfähigen Programms, in diesem Beispiel die Nutzung eines Scanners: Der Roboter findet den Weg auch in neuen Labyrinthen. Er benötigt in vielen Fällen kein neues Programm. Ausnahmen sind komplett neue Situationen (zum Beispiel ein Labyrinth mit unsichtbaren Wänden).
Nachteile eines anpassungsfähigen Programms: Manche Situationen können nicht vorhergesehen werden. Dann ist der Roboter wieder auf Hilfe angewiesen.
Funktion des Scanners
Der Scanner schaut vorne, rechts und links, ob er etwas berührt. Dazu wechselt das Kostüm blitzschnell zu einem Punkt vorne, links oder rechts vom Roboter und prüft, ob dort die Farbe der Wand berührt wird.
Vorgehensweise des Roboters
Der Roboter scannt stetig seine Umgebung. Wenn er rechts kein Hindernis feststellt, dreht er sich nach rechts. Hat es rechts ein Hindernis, prüft er, ob es vor ihm und links von ihm ein Hindernis hat. Hat es links kein Hindernis, vor ihm aber schon, dreht er sich nach links. Ist dies nicht der Fall und hat es vor ihm kein Hindernis, geht er vorwärts. Sonst dreht er sich nach rechts.
Dadurch folgt der Roboter immer der rechten Wand und kommt so in einem normalen Labyrinth irgendwann ans Ziel. Er kann aber auch ausgetrickst werden. Zum Beispiel indem man den Ausgang bei einer Insel in der Mitte setzt, die nicht entlang von Wänden erreicht werden kann.