Datenübertragung im Internet
Die Koordination von mehreren Informatiksystemen untereinander ist für unsere heutige Gesellschaft zentral. Unser Leben ohne Internet ist kaum mehr vorzustellen.
Das Internet ist ein Netzwerk von Millionen von Computern auf der ganzen Welt. Dieses Netzwerk benötigt Regeln, wie Daten ausgetauscht werden können. Eines dieser Regelwerke nennt man Internet Protocol oder kurz IP. Dieses Protokoll funktioniert ähnlich wie die Regeln der Post für den Brief- und Paketversand: Pakete dürfen unter anderem nur eine bestimmte Grösse haben und müssen die Adresse der Empfängerin oder des Empfängers enthalten.
Auch Daten im Internet müssen die Adresse der Senderin oder des Senders und der Empfängerin oder des Empfängers beinhalten. Jedes Gerät im Internet oder in einem lokalen Netzwerk hat eine sogenannte IP-Adresse. IP-Adressen der Version 4 (IPv4) bestehen aus einer Zahlenfolge von folgendem Format: «149.126.4.102». Da die Anzahl möglicher IPv4-Adressen langsam erschöpft ist, gibt es mehr und mehr Adressen der neueren Version 6 (IPv6). Diese sind länger (Beispiel: 2001:0db8:85a3:08d3:1319:8a2e:0370:7344) und ermöglichen dadurch wesentlich mehr Adressen. Im Folgenden arbeiten wir mit den aktuell noch weit verbreiteten IPv4-Adressen.
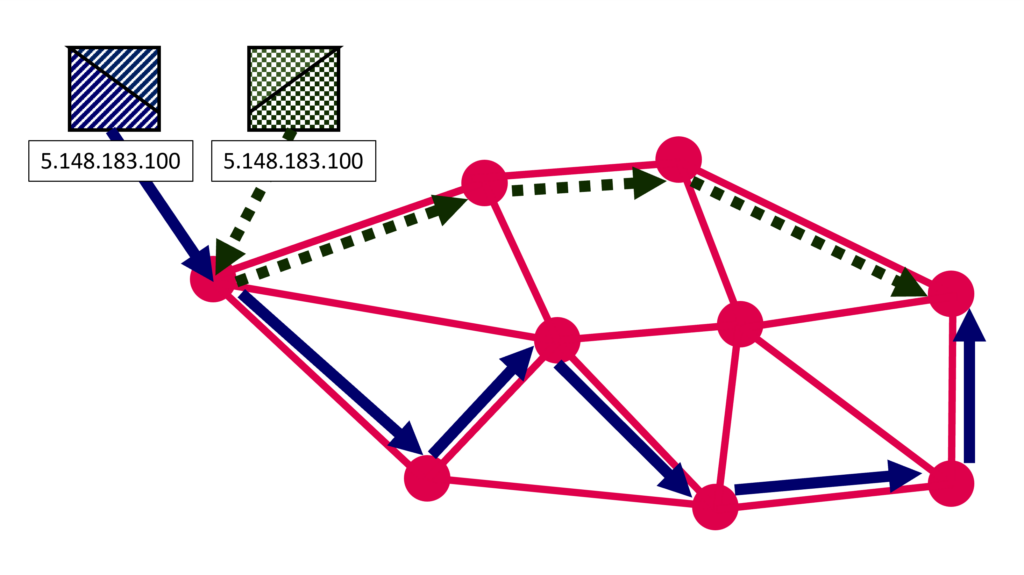
Grosse Dateien werden für den Versand im Internet in kleinere Pakete aufgeteilt. Jedes dieser Pakete beinhaltet die IP-Adresse der Absenderin oder des Absenders und der Empfängerin oder des Empfängers. Diese Pakete werden von Knotenpunkt zu Knotenpunkt weitergeleitet, bis sie an der richtigen Adresse ankommen. Jeder Knotenpunkt (Router) liest die Adresse der Empfängerin oder des Empfängers aus und schickt das Paket weiter. Dabei versucht jeder Knotenpunkt, den besten Weg für das jeweilige Paket auszusuchen. Weil sich die Situation aber innerhalb von Millisekunden verändern kann, kommt es manchmal vor, dass die einzelnen Pakete in einer falschen Reihenfolge und über unterschiedliche Wege (das heisst andere Knotenpunkte) an ihrem Ziel ankommen.
Für diesen Fall braucht es das Transmission Control Protocol oder kurz TCP. TCP hat verschiedene Funktionen. Es gibt jedem Paket eine Nummer. So kann die ursprüngliche Datei wieder zusammengesetzt werden, auch wenn die Pakete in der falschen Reihenfolge ankommen. Daneben bestätigt der Empfängercomputer durch TCP den Erhalt jedes Pakets. So kann ein Paket noch einmal versendet werden, wenn es verloren gegangen ist und dadurch keine Bestätigung ankommt. TCP kann mithilfe der Checksum (Prüfsumme) auch herausfinden, ob die Datei plötzlich Fehler enthält, die auf dem Weg entstanden sind. Das funktioniert beispielsweise mit einem Paritätsbit, dass du in den Lernressourcen zum Kapitel Kommunikation findest.
Wenn du mehr zu Netzwerken und dem Internet erfahren möchtest, kannst du dieses Video von Crash Course Computer Science (Englisch) anschauen:
Roboter und programmierbare Platinen
Nicht nur Computer müssen sich untereinander koordinieren, sondern auch z. B. Roboter. Innerhalb eines Roboters gibt es wiederum viele einzelne Aufgaben, die koordiniert abgearbeitet werden müssen. Beispielsweise nimmt ein Sensor des Roboters wahr, dass er sich auf eine Wand zubewegt und teilt deshalb dem Motor mit, dass er anhalten soll.
Im Unterricht sind für Schülerinnen und Schüler besonders programmierbare Roboter und Platinen interessant. Dort sieht man sehr schnell, ob das Programm funktioniert oder noch Verbesserungen braucht.
Es gibt eine Vielzahl programmierbarer Roboter. Der Bee-Bot lässt sich zum Beispiel über Tasten auf seinem Rücken programmieren. So kann der Roboter einen programmierten Weg abfahren. Der Bee-Bot ist sehr simpel und reagiert nicht auf seine Umwelt, weil er keine Sensoren hat.
Andere Roboter wie zum Beispiel der Thymio haben verschiedene Sensoren, mit denen sie Daten aus ihrer Umgebung gewinnen. Diese Daten können bei der Programmierung genutzt werden, um zum Beispiel Hindernisse zu erkennen (Lasersensor), die Lautstärke zu messen (Audiosensor) oder das Gleichgewicht zu halten (Lagesensor). Durch ihre Aktoren können die Roboter auf ihre Umgebung reagieren. Sie können sich zum Beispiel fortbewegen (Motoren), Geräusche erzeugen (Lautsprecher) oder Lichtsignale geben (LEDs).
Der Thymio kommt zwar mit vorbereiteten Programmen, die er auf Knopfdruck durchführt, er kann aber auch mit verschiedenen Programmiersprachen programmiert werden. Dadurch wird die Koordination des Roboters mit seiner Umwelt möglich. Der Thymio könnte beispielsweise so programmiert werden, dass er auf ein Hindernis vor sich mit einer Kehrtwende reagiert. Beim Erkennen des Hindernisses wäre dann zum Beispiel eine Bedingung, die erfüllt werden muss: «Wenn der Distanzsensor einen kleineren Abstand als 10 cm misst, dann drehe dich um 90 Grad». Auch Schleifen können beim Programmieren von Robotern verwendet werden (drehe dich 5-mal um 30 Grad). Durch das Programmieren eines Roboters können die Schülerinnen und Schüler so zentrale Informatikkompetenzen des Lehrplans 21 erwerben.
Manche Roboter, inklusive dem Thymio, können mit der Programmiersprache Scratch programmiert werden. Diese wird zum Beispiel im Lehrmittel connected 1 und 2 verwendet.
Es gibt auch einfache programmierbare Platinen, die nur wenige Sensoren besitzen. Ein Beispiel dafür ist der Makey Makey. Der Makey Makey nimmt nur wahr, ob ein Stromkreis geschlossen ist oder nicht. Trotzdem kann er für verschiedene Anwendungen genutzt werden und mit Scratch-Programmen kombiniert werden.